En este artículo se presenta una librería de código abierto destinada a la simulación de maniobrabilidad de buques. El objetivo de esta librería es proporcionar un set de modelos que permitan simular las configuraciones habituales de propulsión y gobierno, como hélices, timones, pods, bow thrusters, etc…
El primer modelo a crear es el del comportamiento del buque. Para el propósito de las simulaciones a realizar se ha creado un modelo teórico basado en pequeños movimientos que responda al comportamiento de una forma eficaz para optimizar los tiempos de simulación con una perdida mínima de precisión.

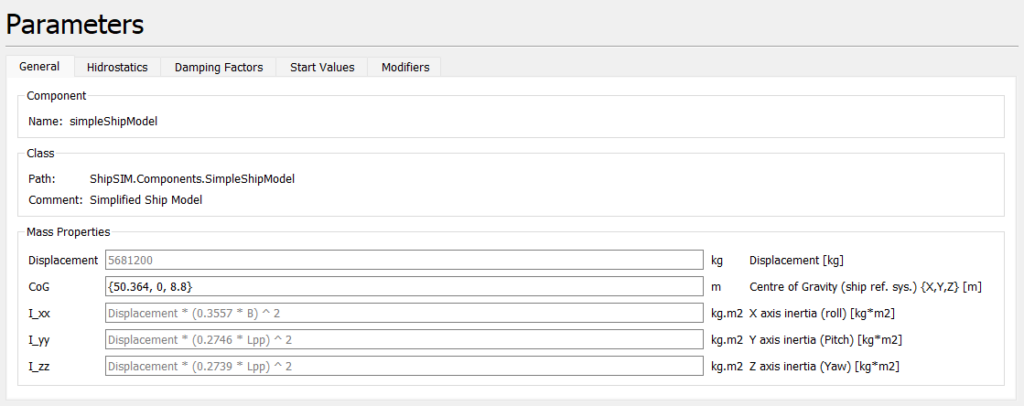
Este modelo está basado en los movimientos de un sólido rígido en un sistema muelle-masa-amortiguador. El sistema masa es el más sencillo de todos, ya que la librería MSL ya incorpora dicho elemento. En este elemento se configura la masa, centro de gravedad, ejes de referencia y momentos de inercia del buque. En el caso de los momentos de inercia, estos son descritos en los ejes de referencia del buque y por lo tanto, al no coincidir con las direcciones principales de inercia los términos cruzados de la matriz de inercia serían elementos no nulos. En la librería presentada se omiten dichos términos por ser despreciables frente a las inercias en las direcciones principales. Los valores por defecto de las inercias están escritos como ecuación en función del radio de giro, qeu es la representación habitual de estos parámetros.
Para las fuerzas de restauración (muelle) se identifican en los movimientos de heave y en los giros de roll y pitch. Para determinar dichas fuerzas se hace uso de las hidrostáticas sin asiento (o con el asiento de navegación) para corregir la posición del centro de carena en función del calado, asiento y escora. Para ello se utilizan funciones de ajuste a dichas características que presentan un menor tiempo de cálculo frente a la interpolación de tablas, además de ser derivables.


Por otro lado, la parte más compleja de modelar son las fuerzas hidrodinámicas, ya que implican tanto una fuerza de amortiguamiento como él efecto de masa añadida. En esta primera versión de la librería se permite introducir funciones polinómicas dependientes de la velocidad en cada uno de los grados de libertad. Esta parte es la más difícil de desarrollar y requiere muchos ensayos de validación, pero en esta primera aproximación se presenta de una forma simple preparada para ser sustituida por rutinas más complejas.

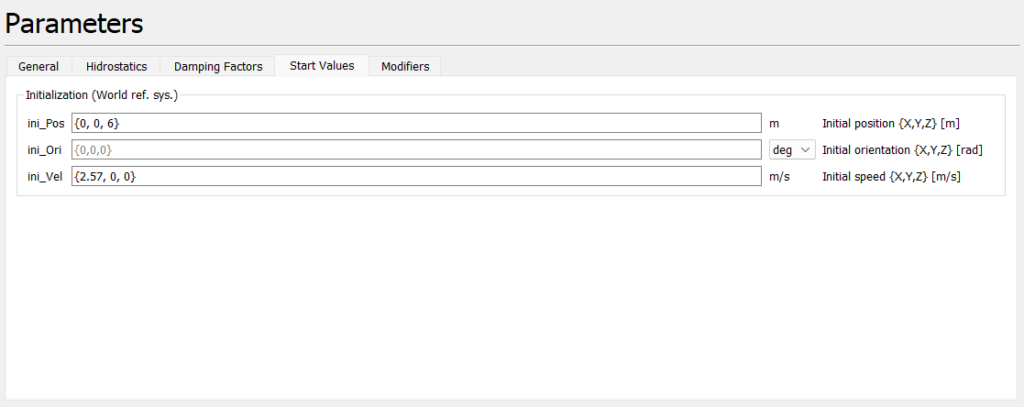
Por último, además de incluir en el modelo las fuerzas de la hélice y timón (cuyos modelos están en desarrollo), se introducen los valores iniciales de posición, orientación y velocidad inicial del buque.
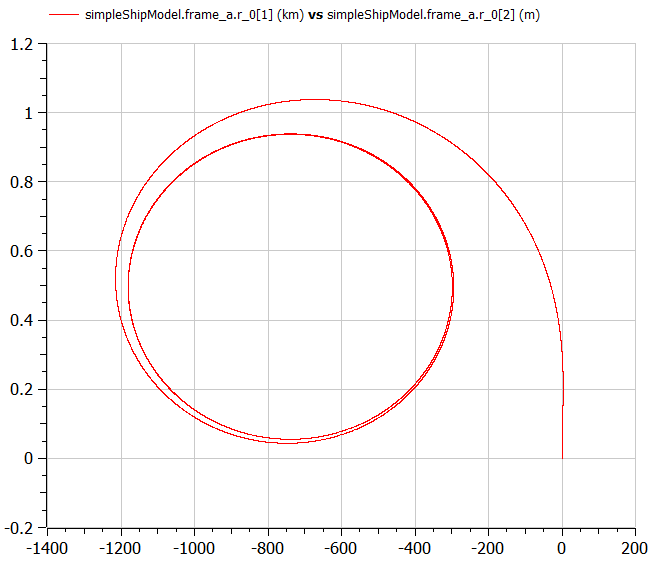
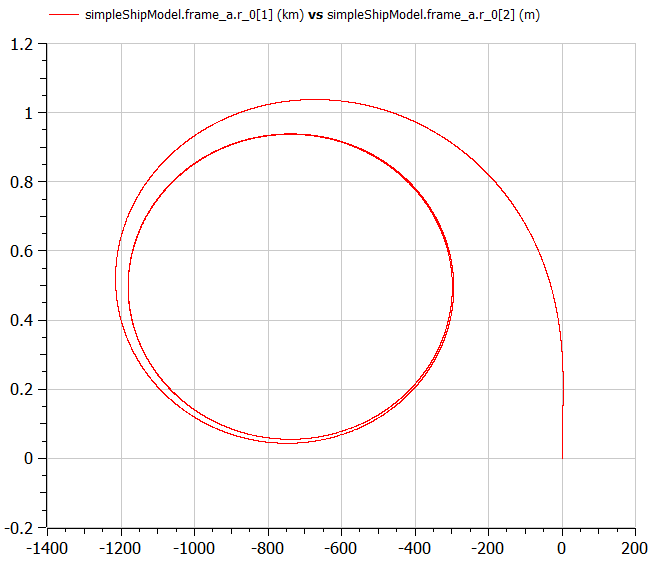
Con el modelo parametrizado y fijada la situación inicial se ejecuta la simulación y se comprueba que la posición del buque sigue una curva evolutiva típica, que evidentemente está sin ajustar a una real ya que las fuerzas y coeficientes hidrodinámicos son sólo de prueba.
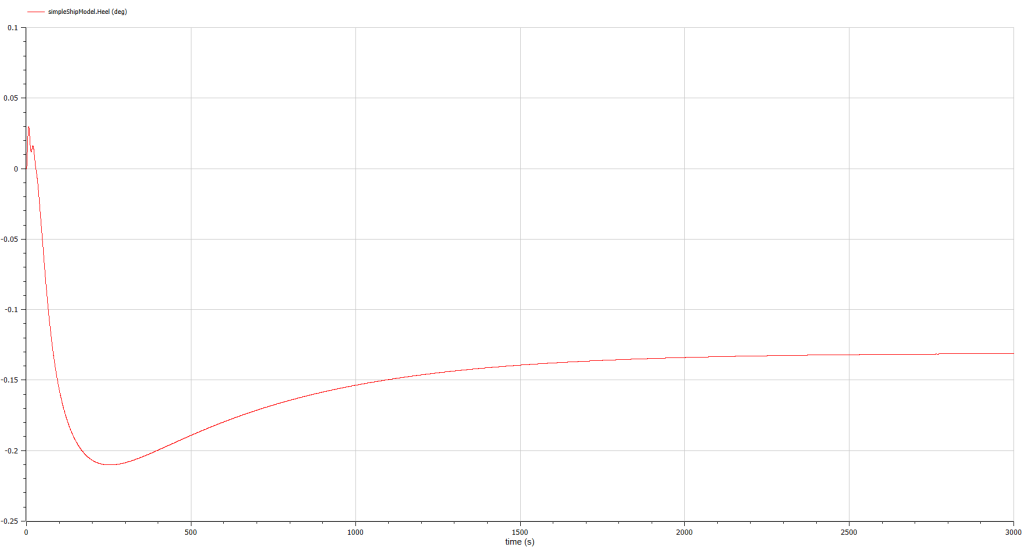
Como la simulación se realiza en los 6 grados de libertad, se puede comprobar que la escora del buque tiende a un valor de equilibrio en función del radio de giro cuando el mismo se estabiliza.
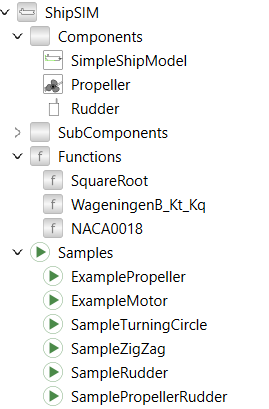
Este artículo presenta cómo es posible simular la maniobrabilidad de un buque mediante el uso del lenguaje Modelica, creando una librería específica para ello: ShipSIM

Ingeniero Naval especialista en diseño conceptual, cálculos de estabilidad, compartimentado, disposición general y cumplimiento de normativa de la IMO y SSCC. Desarrollador de aplicaciones a medida para la resolución de problemas complejos, simulaciones en Modelica para gemelos digitales, automatización de cálculos y mejora de la productividad.
Especialista en control de pesos y miembro de SAWE (Society of Allied Weight Engineers). Ingeniera Naval especialista en protección pasiva al fuego, cálculos de estabilidad, compartimentado, disposición general y cumplimento de normativa IMO y SSCC en proyectos conceptuales y básicos. Desarrollo de modelos y simulaciones de gemelos digitales en Modelica.
Estos artículos pertenecen a la web http://www.ShipTwin.com, que los autores ceden a este grupo de usuarios.